
Jersey Royal potatoes, known for their delicate paper-like skins, traditionally require hand planting to prevent damage. However, the challenging terrain of Jersey‘s steep fields makes this process laborious. Despite attempts to mechanize planting due to labor shortages, success has been elusive until the inception of the groundbreaking PotatoBot.
Elijah Almanzor, a PhD student at the University of Cambridge‘s Bio-inspired Robotics Lab (BIRL) under the guidance of Professor Fumiya Iida, has dedicated three years to developing the PotatoBot. This innovative robot is tailored to assist in planting Jersey Royal potatoes on the island of Jersey, a significant exporter of up to 30,000 tonnes of this crop annually.
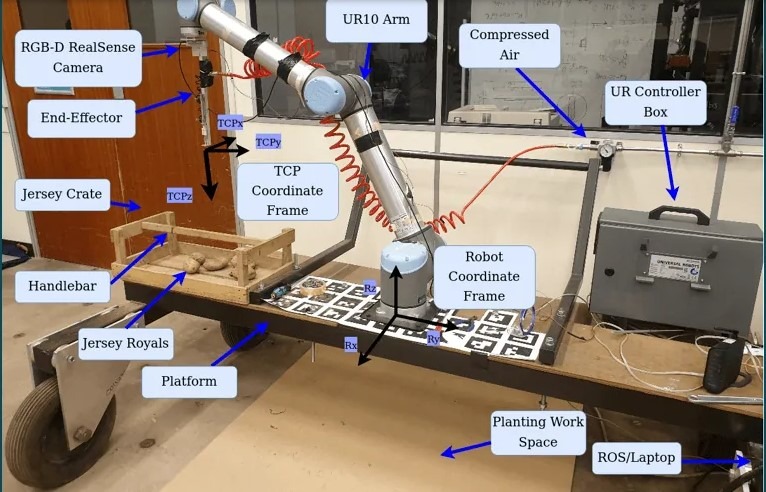
While further refinements are needed for full commercialization, Elijah’s creation promises to revolutionize potato farming in Jersey and potentially enhance crop production practices for other agricultural sectors. The PotatoBot functions as an electric robot powered by a generator in the field or tractor, employing AI computer vision for automation. Its neural network-based computer vision system detects and segregates Jersey Royals using a depth camera mounted on the robot’s wrist.
The primary objective of the PotatoBot is to mimic the planting process carried out by human workers, ensuring precision and care in handling Jersey Royal potatoes. By precisely localizing the potatoes within crates and facilitating seamless picking and planting procedures, the robot streamlines operations regardless of potato placement.
Driven by the necessity to address crop damage caused by previous mechanical methods, the development of the PotatoBot aims for a swift 3.5-second cycle time and a high 90% success rate to ensure commercial viability. Additionally, the robot necessitates an autonomous mobile platform for field deployment.
Supported by the UKRI EPSRC and the Jersey Farmers Union, this project is currently in the proof-of-concept phase, with ongoing field testing crucial for its eventual commercial availability. Elijah underscores the importance of cost-effectiveness, utilizing affordable off-the-shelf components to optimize economic efficiency in an industry characterized by narrow profit margins. The latest laboratory iteration features a faster SCARA robot arm, bringing the project closer to its objectives.





